


في عصر تتسارع فيه الابتكارات الرقمية، أصبحت الحوسبة المكانية (Spatial Computing) تمثل مرحلة جديدة في تطور العلاقة بين الإنسان والتقنية. فبدلا من الاكتفاء بعرض المعلومات على الشاشات التقليدية، باتت الأنظمة الرقمية قادرة على فهم البيئة المحيطة، وتحليل أبعادها، والتفاعل معها في الزمن الحقيقي. ونتيجة لذلك، بدأت هذه التقنية تغير أساليب العمل، والتعلم، والتصميم، وإدارة المدن، لتصبح أحد أهم محاور التحول الرقمي في مختلف القطاعات.
ولا تعمل الحوسبة المكانية بمعزل عن التقنيات الحديثة، بل تعتمد على تكامل وثيق بين الذكاء الاصطناعي، والرؤية الحاسوبية، وإنترنت الأشياء، والحوسبة السحابية، والحوسبة الطرفية، إضافة إلى أجهزة الاستشعار المتقدمة. ويمنح هذا التكامل الأنظمة القدرة على إدراك المكان، وفهم حركة المستخدم والأجسام المحيطة، ثم دمج البيانات الرقمية مع العالم الحقيقي بدقة عالية، مما يفتح الباب أمام تجارب أكثر واقعية وكفاءة.
في هذا الدليل الشامل، ستتعرف إلى مفهوم الحوسبة المكانية، وآلية عملها، وأهم مكوناتها وتقنياتها، إضافة إلى أبرز تطبيقاتها في التعليم، والرعاية الصحية، والصناعة، والهندسة، والمدن الذكية. كما سنوضح الفروق بينها وبين الواقع المعزز (AR)، والواقع الافتراضي (VR)، والواقع المختلط (MR)، والتوأم الرقمي (Digital Twin)، ثم نستعرض مزاياها، وتحدياتها، ومستقبلها، لتخرج برؤية متكاملة حول واحدة من أكثر التقنيات تأثيرا في مستقبل العالم الرقمي.
جدول المحتويات
- ما هي الحوسبة المكانية
- كيف تعمل الحوسبة المكانية؟
- تاريخ الحوسبة المكانية وتطورها
- الفرق بين الحوسبة المكانية والتقنيات المشابهة
- التقنيات التي تعتمد عليها الحوسبة المكانية
- مكونات أنظمة الحوسبة المكانية
- أنواع الحوسبة المكانية
- أهم خصائص الحوسبة المكانية
- أبرز مميزات الحوسبة المكانية
- عيوب وتحديات الحوسبة المكانية
- استخدامات الحوسبة المكانية في مختلف القطاعات
- دور الحوسبة المكانية في الأمن السيبراني
- أمثلة واقعية على الحوسبة المكانية
- أبرز الشركات والمنصات الرائدة في الحوسبة المكانية
- مستقبل الحوسبة المكانية
- هل الحوسبة المكانية آمنة؟
- أفضل الممارسات لتبني الحوسبة المكانية داخل المؤسسات
- نصائح قبل الاستثمار في حلول الحوسبة المكانية
- خاتمة
- الأسئلة الشائعة حول الحوسبة المكانية
- ما الفرق بين الحوسبة المكانية والواقع المعزز؟
- هل تعتمد الحوسبة المكانية على الذكاء الاصطناعي؟
- ما أبرز استخدامات الحوسبة المكانية في الأمن السيبراني؟
- ما الأجهزة المطلوبة للاستفادة من الحوسبة المكانية؟
- ما أبرز التحديات التي تواجه الحوسبة المكانية حاليا؟
- هل ستحل الحوسبة المكانية محل تطبيقات الهواتف وأجهزة الكمبيوتر مستقبلا؟
ما هي الحوسبة المكانية
الحوسبة المكانية (Spatial Computing) هي نموذج حوسبي متقدم يجمع بين العالم الفيزيائي والعالم الرقمي، ويمنح الأنظمة القدرة على إدراك المكان وفهم أبعاده الثلاثية، ثم تحليل البيانات المكانية والتفاعل معها في الزمن الحقيقي. وبفضل ذلك، لا تقتصر الحوسبة على معالجة الأوامر أو عرض المعلومات على شاشة، بل تمتد لتصبح جزءا من البيئة المحيطة بالمستخدم، مما يتيح تجارب أكثر ذكاء وتفاعلا.
ويعتمد هذا النموذج على تكامل مجموعة واسعة من التقنيات، مثل الرؤية الحاسوبية، والذكاء الاصطناعي، وأجهزة الاستشعار، والتتبع المكاني، ورسم الخرائط ثلاثية الأبعاد، وذلك لبناء نموذج رقمي دقيق للبيئة المحيطة. وتستمر هذه الأنظمة في تحديث فهمها للمكان بشكل لحظي مع تغير حركة المستخدم أو الأجسام، وهو ما يسمح باتخاذ قرارات أكثر دقة وتقديم محتوى رقمي يتكيف مع السياق الحقيقي.
ويكمن الفرق الأساسي بين الحوسبة المكانية والحوسبة التقليدية في طريقة التعامل مع المعلومات. فالحوسبة التقليدية تعتمد غالبا على واجهات ثنائية الأبعاد للتفاعل مع البيانات، بينما تجعل الحوسبة المكانية المكان نفسه واجهة للتفاعل، إذ يمكن دمج العناصر الرقمية داخل المكاتب، والمصانع، والمستشفيات، والمنازل، بحيث تصبح البيئة الفيزيائية جزءا من عملية المعالجة والتفاعل، وليس مجرد موقع يوجد فيه المستخدم.
كيف تعمل الحوسبة المكانية؟

تعتمد الحوسبة المكانية على دورة معالجة متكاملة تبدأ بإدراك البيئة المحيطة، ثم تحليلها رقميا، وأخيرا إنشاء تفاعل مباشر بين المستخدم والعناصر الرقمية داخل المكان الحقيقي. ولا يقتصر دور النظام على عرض معلومات فوق المشهد، بل يعمل على فهم المكان وتحديد مواقع الأجسام، ومتابعة حركة المستخدم، وتحديث هذا الفهم باستمرار في الزمن الحقيقي. لذلك، تبدو العناصر الرقمية وكأنها جزء طبيعي من البيئة الفيزيائية، وليست مجرد صور معروضة على شاشة.
ولتحقيق ذلك، تتكامل مجموعة من التقنيات، تشمل أجهزة الاستشعار، والرؤية الحاسوبية، والذكاء الاصطناعي، والتتبع المكاني، والحوسبة السحابية والطرفية. ويؤدي كل عنصر دورا محددا ضمن سلسلة معالجة متصلة، تبدأ بجمع البيانات وتنتهي بتقديم تجربة تفاعلية دقيقة. وكلما انخفض زمن الاستجابة وازدادت دقة البيانات، أصبحت التجربة أكثر واقعية واستقرارا.
المكونات الأساسية للحوسبة المكانية
تعتمد أنظمة الحوسبة المكانية على مجموعة من المكونات المترابطة التي تعمل بصورة متزامنة لبناء نموذج رقمي دقيق للبيئة المحيطة، ثم تحديثه باستمرار أثناء الاستخدام. ويؤدي كل مكون وظيفة محددة، بينما يعتمد نجاح المنظومة على تكامل جميع هذه العناصر دون تأخير أو انقطاع.
تشمل أهم مكونات النظام ما يلي:
- أجهزة الاستشعار، مثل الكاميرات، وLiDAR، ومستشعرات العمق، والجيروسكوب، ومقياس التسارع، لجمع البيانات المكانية.
- وحدات المعالجة المحلية أو السحابية، المسؤولة عن تحليل البيانات وتشغيل نماذج الذكاء الاصطناعي.
- خوارزميات الرؤية الحاسوبية وتقنيات SLAM لبناء الخرائط المكانية وتتبع الموقع والحركة.
- واجهات العرض، مثل النظارات الذكية، وشاشات العرض، والأجهزة القابلة للارتداء.
- شبكات الاتصال منخفضة زمن الاستجابة، مثل 5G، لضمان تبادل البيانات بصورة فورية.
- منصات البرمجيات ومحركات التطوير التي تدير البيئة الرقمية وتنسق جميع عمليات التفاعل.
دورة عمل الحوسبة المكانية
تمر الحوسبة المكانية بدورة تشغيل مستمرة تتكرر مئات المرات في الثانية، حتى يشعر المستخدم بأن التفاعل يحدث بصورة طبيعية وفورية. وتبدأ الدورة بالتقاط بيانات البيئة، ثم تحليلها، وبعد ذلك إنشاء المحتوى الرقمي المناسب، وأخيرا عرض هذا المحتوى داخل المكان الحقيقي بطريقة متزامنة مع حركة المستخدم.
ويمكن تلخيص دورة العمل في المراحل الآتية:
- التقاط البيانات من الكاميرات وأجهزة الاستشعار المختلفة.
- بناء خريطة رقمية ثلاثية الأبعاد للبيئة المحيطة.
- تحليل المشهد باستخدام الذكاء الاصطناعي والرؤية الحاسوبية للتعرف على الأجسام والأسطح وحركة المستخدم.
- توليد المحتوى الرقمي المناسب وفقا للسياق الحالي.
- عرض العناصر الرقمية داخل البيئة الفيزيائية مع تحديثها بصورة لحظية أثناء حركة المستخدم.
وتستمر هذه الدورة دون توقف طوال فترة الاستخدام، لذلك فإن أي تأخير في جمع البيانات أو معالجتها أو عرضها قد يؤدي إلى انخفاض دقة التتبع، أو ضعف استقرار العناصر الرقمية، أو تراجع جودة تجربة المستخدم بشكل عام.
تاريخ الحوسبة المكانية وتطورها
لم تظهر هذه التقنية فجأة، بل هي ثمرة عقود من البحث في مجالات متنوعة كتقنية رؤية الحاسوب، والواقع الافتراضي، وأنظمة تحديد المواقع. بدأت التجارب الأولى في المختبرات الأكاديمية خلال الستينيات والسبعينيات، حيث كانت المعدات ضخمة ومكلفة ومحدودة القدرة، لكنها أرست الأساس النظري لفكرة دمج المعلومات الرقمية مع الفضاء المادي.
مع تطور كروت الشاشة أومعالجات الرسوميات وانخفاض تكلفة أجهزة الاستشعار في العقدين الماضيين، بدأت هذه الأفكار تنتقل من المختبرات إلى المنتجات التجارية. وقد ساهم ظهور الهواتف الذكية المزودة بكاميرات متطورة، ولاحقًا النظارات الذكية وأجهزة الواقع المختلط، في تسريع هذا التحول بشكل ملحوظ.
جاءت الطفرة الحقيقية مع نضوج الذكاء الاصطناعي والحوسبة السحابية، مما أتاح معالجة كميات هائلة من البيانات المكانية في الوقت الفعلي دون الحاجة إلى معدات محلية ضخمة. هذا التقارب بين العديد من التقنيات الناضجة هو ما حوّل هذا المجال من مفهوم تجريبي إلى قطاع استثماري جاد تستثمر فيه كبرى شركات التكنولوجيا بكثافة.
أبرز المحطات التاريخية في تطور الحوسبة المكانية
| الفترة الزمنية | العصر التقني | أبرز المحطات والابتكارات | الأثر الجوهري على الحوسبة المكانية |
|---|---|---|---|
| 1962 | التأسيس | 1962: Morton Heilig يسجل براءة اختراع "Sensorama" — أول جهاز غمر حسي متعدد (صوت، صورة، رائحة، اهتزاز). | أول محاولة تاريخية لخلق بيئة افتراضية تُغمر المستخدم فيها بحواس متعددة، مهدت لمفهوم "التواجد الرقمي". |
| 1968 | التأسيس | 1968: Ivan Sutherland يُنشئ "سيف داموقليس" (The Sword of Damocles) — أول نظام عرض مُثبّت على الرأس (HMD) مرتبط بحاسوب. | حجر الأساس الهندسي للحوسبة المكانية؛ إثبات إمكانية عرض رسومات حاسوبية متزامنة مع حركة رأس المستخدم في بيئة ثلاثية الأبعاد. |
| 1970s | التجارب المبكرة | 1974: تطوير أول قفازات رقمية تفاعلية (DataGlove precursor). 1975: Myron Krueger يُطلق "Videoplace" — بيئة تفاعلية تستجيب لحركة الجسم البشرية دون أجهزة ارتداء. | إثبات أن تفاعل الإنسان مع البيئات الرقمية يمكن أن يكون طبيعياً وبديهياً عبر الجسد وحركاته. |
| 1980s | صياغة المصطلحات | 1985: NASA تطور نظام VIEW للتدريب على المحاكاة الفضائية. 1987: Tom Caudell (بوينغ) يصوغ مصطلح "الواقع المعزز" (Augmented Reality) لأول مرة. 1989: Jaron Lanier يُروّج لمصطلح "الواقع الافتراضي" ويؤسس VPL Research. | تبلور المفاهيم الأساسية: الواقع الافتراضي (الانغماس الكامل) والواقع المعزز (إضافة طبقات رقمية على الواقع). |
| 1990s | التعريف الأكاديمي | 1990: Simon Greenwold يصوغ مصطلح "الحوسبة المكانية" (Spatial Computing) لأول مرة. 1992: نظام "Virtual Fixtures" في القوات الجوية الأمريكية — أول نظام واقع معزز عملي لتحسين الأداء البشري. 1997: Ronald Azima يُعرّف الواقع المعزز رسمياً بثلاثة شروط: دمج الحقيقي والرقمي، التفاعل اللحظي، والتسجيل ثلاثي الأبعاد. 1999: Hirokazu Kato يُطلق ARToolKit — أول مكتبة برمجية مفتوحة المصدر لتتبع العلامات البصرية. | تأسيس الإطار النظري والتقني للحوسبة المكانية كمجال بحثي مستقل، وبدء الانتقال من المختبرات إلى التطبيقات العملية. |
| 2000 - 2007 | النضج المبكر | 2000: Bruce Thomas يُطلق "ARQuake" — أول لعبة واقع معزز محمولة. 2003: إطلاق أول نظام ملاحة واقع معزز في السيارات (BMW). 2007: إطلاق iPhone — بداية عصر الأجهزة المحمولة القوية القادرة على معالجة الصور والملاحة. | بدء دمج الحوسبة المكانية في الحياة اليومية عبر الهواتف والسيارات، وتوسيع قاعدة المستخدمين المحتملين. |
| 2008 - 2012 | الهواتف الذكية | 2008: أول تطبيقات واقع معزز على الهواتف عبر GPS والكاميرا (Wikitude, Layar). 2010: Microsoft تُطلق Kinect — تتبع حركة الجسم بتكلفة منخفضة للمستهلكين. 2012: Google تُطلق Project Glass (Google Glass) — أول نظارة ذكية للواقع المعزز موجهة للمستهلك. | نقل الحوسبة المكانية من الأجهزة المتخصصة إلى أجهزة "قابلة للارتداء" يومياً، رغم محدودية القبول الاجتماعي آنذاك. |
| 2013 - 2016 | الواقع المختلط | 2013: Oculus Rift DK1 يُحدث ثورة في واقع افتراضي منخفض التكلفة وعالي الجودة. 2014: Facebook تستحوذ على Oculus بـ 2 مليار دولار — إشارة لرهان الصناعة الكبرى. 2015: Microsoft تُطلق HoloLens — أول نظارة واقع مختلط مستقلة بالكامل (لا تحتاج حاسوباً أو هاتفاً). 2016: إطلاق Pokémon GO — أول تطبيق واقع معزز يحقق انتشاراً عالمياً (650 مليون تحميل). 2016: إطلاق HTC Vive و Oculus Rift CV1 — واقع افتراضي بجودة استهلاكية عالية. | انتقال الحوسبة المكانية إلى التيار الرئيسي؛ إثبات الجدوى التجارية والتطبيقية على نطاق واسع. |
| 2017 - 2019 | المنصات الكبرى | 2017: Apple تُطلق ARKit و Google تُطلق ARCore — منصتان موحدتان لواقع معزز على مئات الملايين من الأجهزة. 2018: Magic Leap One تُطلق نظارتها بتقنية "حقل الضوء" (Light Field) بعقود قيمتها 2.6 مليار دولار. 2019: Microsoft تفوز بعقد IVAS مع الجيش الأمريكي بقيمة 21.9 مليار دولار لنظارات واقع مختلط عسكرية. | توحيد المعايير التقنية ودخول الحكومات والشركات الكبرى كجهات استثمارية ضخمة في الحوسبة المكانية. |
| 2020 - 2022 | النضج التقني | 2020: إطلاق Meta Quest 2 — بيع أكثر من 20 مليون وحدة، أول جهاز واقع افتراضي يحقق انتشاراً جماهيرياً حقيقياً. 2021: Facebook تُعيد تسمية نفسها إلى "Meta" — إعلان تحول استراتيجي كامل نحو الميتافيرس والحوسبة المكانية. 2022: دمج مستشعرات LiDAR في iPhone و iPad — مسح مكاني ثلاثي الأبعاد عالي الدقة في يد المستهلك. 2022: Snap تُطلق Spectacles 4 — نظارة AR متقدمة لصناع المحتوى. | الحوسبة المكانية تصبح أداة إنتاجية حقيقية، مع بنية تحتية ناضجة من الأجهزة والبرمجيات والمحتوى. |
| 2023 | ما قبل التحول | 2023: Meta تُطلق Quest 3 — أول جهاز استهلاكي بواقع مختلط ملون عالي الجودة وكاميرات ممررة متقدمة. 2023: Apple تُعلن عن Vision Pro في WWDC (يونيو) — تعريف رسمي لمصطلح "الحوسبة المكانية" كمعيار صناعي. 2023: انفجار الذكاء الاصطناعي التوليدي (ChatGPT, Midjourney) يفتح آفاقاً جديدة لتوليد المحتوى المكاني. | التهيئة الكاملة لانطلاق عصر الحوسبة المكانية الحديث؛ تقارب الذكاء الاصطناعي مع العرض المكاني. |
| 2024 | التحول الجذري | فبراير: إطلاق Apple Vision Pro رسمياً — أول حاسوب مكاني متكامل بتقنية Micro-OLED بدقة 4K لكل عين. 2024: التفاعل الطبيعي بالكامل: تتبع العينين + اليدين + الصوت دون وحدات تحكم. 2024: Meta Orion — نظارة AR خفيفة الوزن بنموذج أولي متقدم (70 غرام). 2024: Qualcomm تُطلق Snapdragon XR2+ Gen 2 — معالج مخصص للحوسبة المكانية بقوة 4.6K لكل عين. 2024: Google و Samsung يتحالفان لتطوير منصة حوسبة مكانية منافسة (Project Moohan / Android XR). | إعادة تعريف الصناعة بالكامل. الانتقال من "النظر إلى الشاشات" إلى "التواجد داخل المحتوى الرقمي" بتناغم تام مع البيئة الحقيقية. Apple تضع المعيار الذهبي. |
| 2025 | الذكاء المكاني | 2025: الدمج الكامل مع الذكاء الاصطناعي التوليدي — توليد بيئات وأجسام ثلاثية الأبعاد فورياً عبر الأوامر الصوتية والنصية. 2025: إطلاق Android XR رسمياً مع شركاء Samsung و Google — أول نظام تشغيل مكاني مفتوح. 2025: معالجات مخصصة أصغر حجماً وأقل استهلاكاً للطاقة (Snapdragon AR2 Gen 2). 2025: وكلاء ذكاء اصطناعي مكانيون (Spatial AI Agents) — مساعدون افتراضيون يفهمون البيئة ويتفاعلون معها. 2025: بدء اعتماد الحوسبة المكانية في الطب والتعليم والتصنيع بشكل مؤسسي واسع. | الحوسبة المكانية تصبح "ذكية"؛ الأجهزة لا تفهم الفضاء فحسب، بل تفهم السياق والنية البشرية، وتتنبأ باحتياجات المستخدم. |
| 2026 | الحوسبة العصبية | 2026: واجهات الدماغ والحاسوب غير الجراحية (BCI) — التحكم في الواجهات المكانية عبر الإشارات العصبية. 2026: اللمس الهوائي (Mid-air Haptics) — الشعور بالأجسام الرقمية عبر موجات فوق صوتية دون قفازات. 2026: التوائم الرقمية الفورية (Real-time Digital Twins) — نسخ حيّة من البيئات تُحدَّث لحظياً. 2026: نظارات AR بحجم النظارات العادية (أقل من 50 غرام) مع أداء حوسبي عالٍ. 2026: بروتوكولات الحوسبة المكانية الموحدة عالمياً — توافقية كاملة بين الأجهزة والمنصات. | اختفاء الحدود بين العالمين الرقمي والفيزيائي. الحوسبة المكانية تصبح امتداداً طبيعياً للإدراك البشري والحواس، وليست أداة خارجية. |
الفرق بين الحوسبة المكانية والتقنيات المشابهة
كثيرا ما يختلط هذا المفهوم مع تقنيات أخرى قريبة منه، وهو أمر مفهوم نظرا للتداخل الكبير في الأدوات والأجهزة المستخدمة. لكن الفهم الدقيق للفروقات ضروري لأي مؤسسة تخطط للاستثمار في هذا المجال، لأن اختيار التقنية الخاطئة قد يكلف وقتا وموارد كبيرة دون تحقيق النتيجة المرجوة.
في الأقسام التالية، سنوضح الفروقات الجوهرية بين هذا المفهوم الشامل وبين التقنيات الفرعية أو المتقاطعة معه، بدءا من الحوسبة السحابية وصولا إلى التوأم الرقمي، مع تسليط الضوء على نقاط التقاطع والاختلاف في كل حالة.
1. الفرق بين الحوسبة المكانية والحوسبة السحابية
الحوسبة السحابية هي نموذج لتقديم موارد المعالجة والتخزين عبر الإنترنت دون الحاجة لبنية تحتية محلية ضخمة، بينما تركز الحوسبة المكانية على دمج البيانات الرقمية مع المكان الفيزيائي وتفسيرها بشكل تفاعلي. الأولى تجيب عن سؤال “أين تتم المعالجة”، والثانية تجيب عن سؤال “كيف يفهم النظام المكان ويتفاعل معه”.
رغم هذا الاختلاف الجوهري في الغرض، فإن العلاقة بين التقنيتين تكاملية وليست تنافسية، إذ تعتمد أغلب أنظمة الحوسبة المكانية الحديثة على البنية السحابية لتشغيل نماذج الذكاء الاصطناعي الثقيلة ومعالجة البيانات الضخمة الناتجة عن المستشعرات:
- الحوسبة السحابية توفر القدرة الحاسوبية والتخزين اللازمين لتشغيل النماذج المعقدة
- الحوسبة المكانية توفر طبقة الإدراك والتفاعل مع البيئة الفيزيائية
- الجمع بينهما يتيح تجارب مكانية دقيقة دون إثقال الأجهزة الطرفية
2. الفرق بين الحوسبة المكانية و الواقع الممتد
| المعيار | الحوسبة المكانية | الواقع الممتد |
|---|---|---|
| التعريف | طبقة تقنية شاملة لدمج الرقمي بالفيزيائي | مصطلح مظلي يجمع الواقع المعزز والافتراضي والمختلط |
| النطاق | أوسع ويشمل البنية التحتية والمعالجة والإدراك | يركز على تجارب العرض المرئي والتفاعل الحسي |
| الاعتماد | يعتمد على السحابة والذكاء الاصطناعي وإنترنت الأشياء | يعتمد بشكل أساسي على أجهزة العرض والتتبع الحركي |
| الهدف | فهم المكان ومعالجته وربطه بالبيانات | تقديم تجربة بصرية أو غامرة للمستخدم |
3. الفرق بين الحوسبة المكانية والواقع المعزز
| المعيار | الحوسبة المكانية | الواقع المعزز |
|---|---|---|
| التعريف | منظومة كاملة لفهم المكان ومعالجته وربطه بالبيانات | تقنية لإضافة عناصر رقمية فوق مشهد العالم الحقيقي |
| مستوى الإدراك | إدراك عميق ومستمر للبيئة وأبعادها | إضافة بصرية تعتمد على تتبع بسيط للمشهد |
| مجال الاستخدام | المصانع والمستشفيات والمدن الذكية والأمن السيبراني | التطبيقات الاستهلاكية والتسويقية والتعليمية البسيطة |
| العلاقة | يمكن اعتبار الواقع المعزز أحد تطبيقاتها | يعد أحد الأشكال التطبيقية للحوسبة المكانية |
4. الفرق بين الحوسبة المكانية والواقع الافتراضي
| المعيار | الحوسبة المكانية | الواقع الافتراضي |
|---|---|---|
| البيئة | تدمج المحتوى الرقمي مع المكان الفيزيائي الحقيقي | تنقل المستخدم بالكامل إلى بيئة رقمية معزولة |
| الوعي بالمحيط | يحافظ المستخدم على وعيه الكامل بمحيطه الفعلي | ينعزل المستخدم عن محيطه الفيزيائي أثناء الاستخدام |
| الأجهزة | مستشعرات وكاميرات وأنظمة تتبع مفتوحة على البيئة | خوذات وسماعات عرض مغلقة تحجب الرؤية الخارجية |
| الاستخدام النموذجي | العمليات الصناعية والصيانة الميدانية والجراحة | التدريب المحاكى والألعاب الغامرة والتعليم التجريبي |
5. الفرق بين الحوسبة المكانية والواقع المختلط
| المعيار | الحوسبة المكانية | الواقع المختلط |
|---|---|---|
| التعريف | إطار تقني شامل يربط البيانات بالمكان الفيزيائي | تجربة تدمج عناصر رقمية تتفاعل فعليا مع المكان الحقيقي |
| العمق التقني | يشمل البنية التحتية والمعالجة والشبكات والأمن | يركز على تجربة التفاعل البصري والحركي للمستخدم |
| نطاق التطبيق | يمتد ليشمل قطاعات كاملة كالصناعة والصحة والمدن | غالبا محصور في تطبيقات محددة تعتمد على أجهزة عرض متقدمة |
| العلاقة بينهما | الواقع المختلط أحد أشكال تطبيق الحوسبة المكانية عمليا | يمثل الطبقة التجريبية المرئية لهذا المفهوم الأوسع |
6. الفرق بين الحوسبة المكانية والتوأم الرقمي
| المعيار | الحوسبة المكانية | التوأم الرقمي |
|---|---|---|
| التعريف | منظومة لإدراك المكان الفيزيائي وربطه بالبيانات آنيا | نسخة رقمية دقيقة لأصل فيزيائي، مثل مصنع أو مبنى |
| طبيعة التمثيل | تفاعل مباشر ومستمر مع المكان الحقيقي نفسه | محاكاة رقمية منفصلة تحاكي سلوك الأصل الحقيقي |
| الاستخدام الأساسي | تفاعل المستخدم مع البيئة في الزمن الحقيقي | محاكاة السيناريوهات واختبارها قبل تطبيقها فعليا |
| العلاقة | توفر البيانات الحية التي يمكن أن يستفيد منها التوأم الرقمي | يستخدم أحيانا مخرجات الحوسبة المكانية لتحديث نموذجه باستمرار |
التقنيات التي تعتمد عليها الحوسبة المكانية
لا تعتمد الحوسبة المكانية على تقنية واحدة، بل تقوم على منظومة متكاملة من التقنيات التي تعمل معا لبناء فهم رقمي دقيق للعالم الفيزيائي. فكل عملية، بدءا من التقاط البيانات وتحليلها، ومرورا بفهم البيئة المحيطة، وانتهاء بعرض المحتوى الرقمي والتفاعل معه، تعتمد على تعاون مستمر بين الذكاء الاصطناعي، والرؤية الحاسوبية، وأجهزة الاستشعار، والحوسبة السحابية، وغيرها من التقنيات الحديثة. ولهذا السبب، فإن نجاح أي نظام يعتمد على تكامل هذه المكونات، وليس على قوة تقنية واحدة فقط.
ومع استمرار تطور التحول الرقمي، أصبحت هذه التقنيات أكثر ترابطا من أي وقت مضى. فالتقدم في أحد المجالات ينعكس مباشرة على أداء المجالات الأخرى، مما يرفع دقة الإدراك المكاني، ويحسن سرعة الاستجابة، ويجعل التجارب الرقمية أكثر واقعية واستقرارا. وفيما يلي أهم التقنيات التي تشكل الأساس الحقيقي للحوسبة المكانية.
أجهزة الاستشعار وأنظمة الإدراك
تمثل أجهزة الاستشعار نقطة البداية في أي نظام حوسبة مكانية، لأنها المسؤولة عن جمع البيانات من البيئة المحيطة وتحويلها إلى معلومات رقمية قابلة للتحليل. وتشمل هذه الأجهزة الكاميرات، ومستشعرات العمق، وLiDAR، والجيروسكوب، ومقياس التسارع، وأجهزة تحديد الموقع، حيث يعمل كل منها على قياس جانب مختلف من البيئة أو حركة المستخدم.
ولا تقتصر وظيفة هذه الأجهزة على التقاط الصور أو قياس المسافات، بل تعمل بصورة متواصلة لتحديث فهم النظام للمكان أثناء حركة المستخدم أو تغير البيئة. وكلما ازدادت دقة المستشعرات وسرعة قراءتها، أصبحت الحوسبة المكانية أكثر قدرة على إنشاء نماذج رقمية دقيقة والتفاعل معها في الزمن الحقيقي.
الذكاء الاصطناعي
يشكل الذكاء الاصطناعي العقل التحليلي لمنظومة الحوسبة المكانية، إذ يحول البيانات الخام القادمة من المستشعرات إلى معلومات قابلة للفهم واتخاذ القرار. ومن خلال نماذج التعلم العميق وتحليل الأنماط، يستطيع النظام التعرف على الأشخاص والأجسام، وتصنيفها، وفهم العلاقات المكانية فيما بينها بدقة عالية.
ومع تطور نماذج الذكاء الاصطناعي متعددة الوسائط، أصبحت الأنظمة قادرة على دمج البيانات البصرية والصوتية والمكانية والسياقية في نموذج موحد، مما يسمح بتفاعل أكثر ذكاء مع المستخدم، ويزيد من قدرة الأنظمة على التنبؤ بالأحداث والاستجابة لها بصورة استباقية.
الرؤية الحاسوبية
تمنح الرؤية الحاسوبية الأنظمة القدرة على تفسير العالم المرئي وفهم مكوناته، بدلا من الاكتفاء بالتقاط الصور. وتعتمد هذه التقنية على خوارزميات متقدمة لتحليل المشاهد، واكتشاف الأجسام، وتقدير العمق، وتتبع الحركة، ورسم الحدود الفاصلة بين العناصر المختلفة داخل البيئة.
وتعد الرؤية الحاسوبية حجر الأساس في بناء الخرائط ثلاثية الأبعاد، واكتشاف الأسطح، وتحديد مواضع العناصر الرقمية بدقة داخل المكان الحقيقي. لذلك، فإن جودة تجربة الحوسبة المكانية ترتبط ارتباطا مباشرا بكفاءة خوارزميات الرؤية الحاسوبية المستخدمة.
إنترنت الأشياء
يسهم إنترنت الأشياء (IoT) في توسيع نطاق إدراك الأنظمة من خلال ربط آلاف المستشعرات والأجهزة الذكية داخل المباني والمصانع والمدن. وتعمل هذه الأجهزة على إرسال بيانات مستمرة حول البيئة، مثل درجات الحرارة، والإضاءة، والرطوبة، وحركة المعدات، واستهلاك الطاقة.
ويؤدي هذا التدفق المستمر للبيانات إلى بناء صورة أكثر دقة عن الواقع الفيزيائي، مما يسمح لأنظمة الحوسبة المكانية باتخاذ قرارات تعتمد على معلومات حية، وليس على البيانات البصرية فقط، وهو ما يزيد من كفاءة التطبيقات الصناعية والخدمية.
التوأم الرقمي
يمثل التوأم الرقمي (Digital Twin) نسخة رقمية محدثة باستمرار لكيان مادي، سواء كان مبنى، أو مصنعا، أو آلة، أو مدينة كاملة. ويعتمد هذا النموذج على البيانات القادمة من المستشعرات لإنشاء محاكاة دقيقة تعكس الحالة الفعلية للأصل الحقيقي في الزمن الحقيقي.
وعند دمج التوأم الرقمي مع الحوسبة المكانية، يصبح بالإمكان التجول داخل النسخة الرقمية، ومراقبة الأداء، واختبار السيناريوهات المختلفة، واكتشاف الأعطال قبل حدوثها. ولهذا السبب، أصبح هذا التكامل أحد أهم التطبيقات في الصناعة الذكية، وإدارة البنية التحتية، والمدن الذكية.
الحوسبة السحابية
توفر الحوسبة السحابية الموارد اللازمة لتخزين ومعالجة الكميات الضخمة من البيانات التي تنتجها أنظمة الحوسبة المكانية. كما تتيح تشغيل نماذج الذكاء الاصطناعي المعقدة، وإدارة الخرائط ثلاثية الأبعاد، ومشاركة البيانات بين عدد كبير من المستخدمين والأجهزة.
وتساعد البنية السحابية كذلك على تحديث البرمجيات والنماذج الذكية بصورة مستمرة دون الحاجة إلى إجراء تعديلات على الأجهزة الطرفية، مما يقلل تكاليف التشغيل ويزيد من مرونة الأنظمة، خاصة في المشاريع واسعة النطاق.
الحوسبة الطرفية
رغم أهمية الحوسبة السحابية، فإن بعض التطبيقات تحتاج إلى استجابة فورية لا تسمح بإرسال البيانات إلى مراكز بيانات بعيدة. وهنا يأتي دور الحوسبة الطرفية (Edge Computing)، التي تنقل جزءا من عمليات المعالجة إلى الأجهزة نفسها أو إلى خوادم قريبة من المستخدم.
ويؤدي هذا الأسلوب إلى تقليل زمن الاستجابة، وتحسين سرعة التفاعل، وتقليل استهلاك النطاق الترددي، وهو ما يجعله خيارا مثاليا للتطبيقات الطبية، والصناعية، والروبوتية، وغيرها من السيناريوهات التي تعتمد على القرارات اللحظية.
شبكات الجيل الخامس والجيل السادس
تعتمد الحوسبة المكانية على شبكات اتصال سريعة ومنخفضة زمن الاستجابة لنقل البيانات بين الأجهزة والخوادم بصورة مستمرة. وقد ساهمت شبكات الجيل الخامس (5G) في تحسين جودة هذه التجارب بفضل سرعاتها العالية وقدرتها على دعم عدد كبير من الأجهزة المتصلة في الوقت نفسه.
أما شبكات الجيل السادس (6G)، فما تزال في مرحلة البحث والتطوير، إلا أن التوقعات تشير إلى أنها ستوفر سرعات أعلى، وزمن استجابة أقل، وقدرات أكبر على معالجة البيانات المكانية، مما سيفتح المجال أمام تطبيقات أكثر تعقيدا واعتمادا على الذكاء الاصطناعي.
الخرائط ثلاثية الأبعاد ونظم المعلومات الجغرافية
تعتمد الحوسبة المكانية على الخرائط ثلاثية الأبعاد ونظم المعلومات الجغرافية (GIS) لبناء نموذج رقمي دقيق للمكان وربط البيانات بإحداثياتها الحقيقية. ويساعد ذلك على تحديد مواقع الأجسام، وقياس المسافات، وتحليل العلاقات المكانية بين مختلف العناصر.
وتستخدم هذه التقنيات على نطاق واسع في المدن الذكية، والتخطيط الحضري، وإدارة المرافق، والملاحة داخل المباني، حيث تتيح إنشاء بيئات رقمية دقيقة يمكن تحديثها باستمرار اعتمادا على البيانات الواردة من المستشعرات والأجهزة الذكية.
محركات التصيير ثلاثية الأبعاد
تمثل محركات التصيير ثلاثية الأبعاد الطبقة البرمجية المسؤولة عن إنشاء البيئات الرقمية وإظهارها بصورة واقعية وتفاعلية. وتوفر هذه المحركات أدوات متقدمة لبناء المشاهد، ومحاكاة الإضاءة والظلال، وإدارة الحركة، والتعامل مع الفيزياء الرقمية، مما يجعل التفاعل داخل البيئة أكثر إقناعا.
وتعتمد العديد من تطبيقات الحوسبة المكانية على محركات مثل Unity وUnreal Engine لتطوير التجارب التفاعلية، بينما تزداد أهمية المعايير المفتوحة مثل OpenUSD في تسهيل تبادل النماذج ثلاثية الأبعاد بين المنصات المختلفة، وهو ما يعزز قابلية التشغيل البيني ويدعم مستقبل الأنظمة المكانية.
مكونات أنظمة الحوسبة المكانية
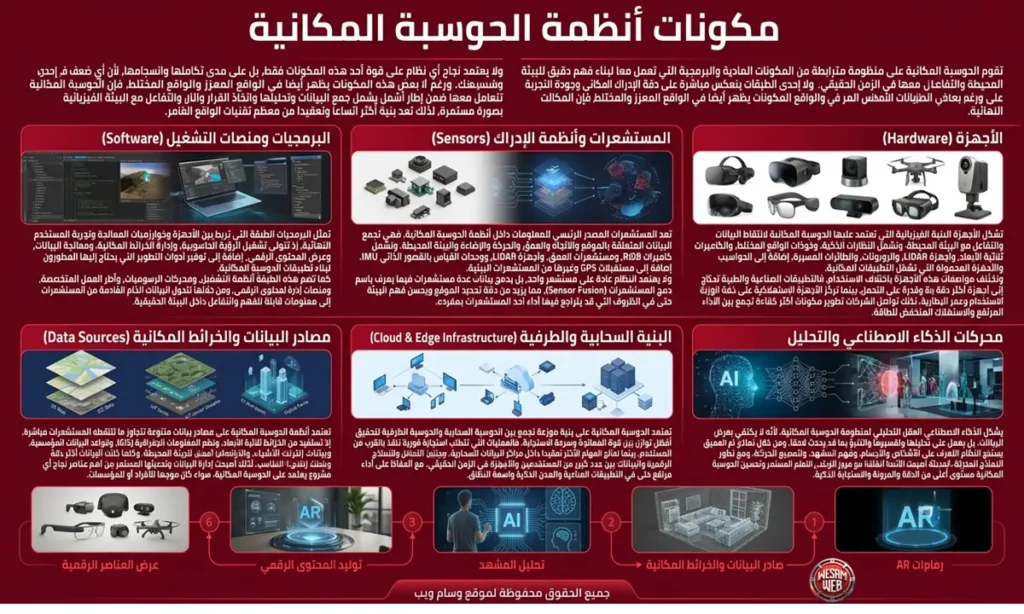
تقوم الحوسبة المكانية على منظومة مترابطة من المكونات المادية والبرمجية التي تعمل معا لبناء فهم دقيق للبيئة المحيطة والتفاعل معها في الزمن الحقيقي. ولا يعتمد نجاح أي نظام على قوة أحد هذه المكونات فقط، بل على مدى تكاملها وانسجامها، لأن أي ضعف في إحدى الطبقات ينعكس مباشرة على دقة الإدراك المكاني وجودة التجربة النهائية.
ورغم أن بعض هذه المكونات يظهر أيضا في الواقع المعزز والواقع المختلط، فإن الحوسبة المكانية تتعامل معها ضمن إطار أشمل يشمل جمع البيانات وتحليلها واتخاذ القرار والتفاعل مع البيئة الفيزيائية بصورة مستمرة، لذلك تعد بنية أكثر اتساعا وتعقيدا من معظم تقنيات الواقع الغامر.
الأجهزة (Hardware)
تشكل الأجهزة Hardware البنية الفيزيائية التي تعتمد عليها الحوسبة المكانية لالتقاط البيانات والتفاعل مع البيئة المحيطة. وتشمل النظارات الذكية، وخوذات الواقع المختلط، والكاميرات ثلاثية الأبعاد، وأجهزة LiDAR، والروبوتات، والطائرات المسيرة، إضافة إلى الحواسيب والأجهزة المحمولة التي تشغل التطبيقات المكانية.
وتختلف مواصفات هذه الأجهزة باختلاف الاستخدام، فالتطبيقات الصناعية والطبية تحتاج إلى أجهزة أكثر دقة وقدرة على التحمل، بينما تركز الأجهزة الاستهلاكية على خفة الوزن وسهولة الاستخدام وعمر البطارية. لذلك تواصل الشركات تطوير مكونات أكثر كفاءة تجمع بين الأداء المرتفع والاستهلاك المنخفض للطاقة.
المستشعرات وأنظمة الإدراك (Sensors)
تعد المستشعرات المصدر الرئيسي للمعلومات داخل أنظمة الحوسبة المكانية، فهي تجمع البيانات المتعلقة بالموقع والاتجاه والعمق والحركة والإضاءة والبيئة المحيطة. وتشمل كاميرات RGB، ومستشعرات العمق، وأجهزة LiDAR، ووحدات القياس بالقصور الذاتي IMU، إضافة إلى مستقبلات GPS وغيرها من المستشعرات البيئية.
ولا يعتمد النظام عادة على مستشعر واحد، بل يدمج بيانات عدة مستشعرات فيما يعرف باسم دمج المستشعرات (Sensor Fusion)، مما يزيد من دقة تحديد الموقع ويحسن فهم البيئة حتى في الظروف التي قد يتراجع فيها أداء أحد المستشعرات بمفرده.
البرمجيات ومنصات التشغيل (Software)
تمثل البرمجيات (Software) الطبقة التي تربط بين الأجهزة وخوارزميات المعالجة وتجربة المستخدم النهائية، إذ تتولى تشغيل الرؤية الحاسوبية، وإدارة الخرائط المكانية، ومعالجة البيانات، وعرض المحتوى الرقمي، إضافة إلى توفير أدوات التطوير التي يحتاج إليها المطورون لبناء تطبيقات الحوسبة المكانية.
كما تضم هذه الطبقة أنظمة التشغيل، ومحركات الرسوميات، وأطر العمل المتخصصة، ومنصات إدارة المحتوى الرقمي. ومن خلالها تتحول البيانات الخام القادمة من المستشعرات إلى معلومات قابلة للفهم والتفاعل داخل البيئة الحقيقية.
محركات الذكاء الاصطناعي والتحليل
يشكل الذكاء الاصطناعي العقل التحليلي لمنظومة الحوسبة المكانية، لأنه لا يكتفي بعرض البيانات، بل يعمل على تحليلها وتفسيرها والتنبؤ بما قد يحدث لاحقا. ومن خلال نماذج التعلم العميق يستطيع النظام التعرف على الأشخاص والأجسام، وفهم المشهد، وتتبع الحركة، واتخاذ قرارات تتوافق مع السياق المحيط.
ومع تطور النماذج الحديثة، أصبحت الأنظمة أكثر قدرة على التعلم المستمر وتحسين أدائها تلقائيا مع مرور الوقت، وهو ما يمنح تطبيقات الحوسبة المكانية مستوى أعلى من الدقة والمرونة والاستجابة الذكية.
البنية السحابية والطرفية (Cloud & Edge Infrastructure)
تعتمد الحوسبة المكانية على بنية موزعة تجمع بين الحوسبة السحابية والحوسبة الطرفية لتحقيق أفضل توازن بين قوة المعالجة وسرعة الاستجابة. فالعمليات التي تتطلب استجابة فورية تنفذ بالقرب من المستخدم، بينما تعالج المهام الأكثر تعقيدا داخل مراكز البيانات السحابية.
ويتيح هذا التكامل مشاركة الخرائط ثلاثية الأبعاد والنماذج الرقمية والبيانات بين عدد كبير من المستخدمين والأجهزة في الزمن الحقيقي، مع الحفاظ على أداء مرتفع حتى في التطبيقات الصناعية والمدن الذكية واسعة النطاق.
مصادر البيانات والخرائط المكانية (Data Sources)
تعتمد أنظمة الحوسبة المكانية على مصادر بيانات متنوعة تتجاوز ما تلتقطه المستشعرات مباشرة، إذ تستفيد من الخرائط ثلاثية الأبعاد، ونظم المعلومات الجغرافية (GIS)، وقواعد البيانات المؤسسية، وبيانات إنترنت الأشياء، والتوائم الرقمية، وغيرها من المصادر التي تضيف للنظام فهما أعمق للبيئة المحيطة.
وكلما كانت البيانات أكثر دقة وحداثة وتنظيما، ازدادت قدرة النظام على فهم المكان واتخاذ قرارات صحيحة في الوقت المناسب. لذلك أصبحت إدارة البيانات وتحديثها المستمر من أهم عناصر نجاح أي مشروع يعتمد على الحوسبة المكانية، سواء كان موجها للأفراد أو للمؤسسات.
أنواع الحوسبة المكانية
لا تتخذ الحوسبة المكانية شكلا واحدا، بل تظهر بعدة أنماط تختلف بحسب طريقة دمج العالم الرقمي مع البيئة الفيزيائية ومستوى التفاعل المطلوب من المستخدم أو النظام. بعض الأنواع يركز على إضافة معلومات فوق المشهد الحقيقي، بينما يهدف بعضها الآخر إلى بناء بيئات رقمية كاملة أو إنشاء نماذج مرتبطة بالواقع في الزمن الحقيقي.
ويعد فهم هذه الأنواع ضروريا عند اختيار الحل المناسب، لأن متطلبات مصنع ذكي تختلف عن متطلبات منصة تدريب افتراضي أو نظام روبوتات ذاتية. كما أن العديد من التطبيقات الحديثة تجمع أكثر من نوع في الوقت نفسه، إلا أن هذا التصنيف يساعد على فهم الفروق الجوهرية بين أساليب الإدراك المكاني المختلفة.
الإدراك المعتمد على الواقع المعزز

يركز هذا النوع على إضافة عناصر رقمية إلى المشهد الحقيقي مع إبقاء البيئة المحيطة مرئية بالكامل. تظهر المعلومات أو النماذج ثلاثية الأبعاد أو الإرشادات مباشرة أمام المستخدم دون عزله عن العالم الفيزيائي، مما يجعل التجربة خفيفة وسريعة وسهلة الاستخدام.
ويستخدم هذا الأسلوب في الملاحة داخل المباني، والتجزئة، والتعليم، والصيانة الميدانية، حيث يحتاج المستخدم إلى معلومات سياقية فورية دون الحاجة إلى تجهيزات معقدة أو بيئات غامرة بالكامل.
مقالة ذات صلة: الواقع المعزز (AR): تعرف على بوابة العصر الرقمي الجديد Augmented Reality.
الإدراك المعتمد على الواقع المختلط
يذهب هذا النوع خطوة أبعد من الواقع المعزز، إذ تصبح العناصر الرقمية قادرة على التفاعل مع البيئة الحقيقية وكأنها جزء منها. يمكن للنماذج الرقمية أن تستقر على الأسطح، وتتأثر بالحركة، وتحافظ على موقعها بدقة أثناء تنقل المستخدم داخل المكان.
ولهذا السبب يستخدم بكثرة في الهندسة والتصميم الصناعي والرعاية الصحية، حيث يحتاج المستخدم إلى رؤية المجسمات الرقمية وهي تتفاعل مع المساحة الفعلية بطريقة واقعية تساعد على اكتشاف المشكلات واتخاذ قرارات أدق.
البيئات الافتراضية الغامرة
في هذا النوع ينتقل المستخدم بالكامل إلى بيئة رقمية مستقلة تحل محل المشهد الحقيقي المحيط به. ورغم أن البيئة افتراضية، فإن النظام يعتمد على مبادئ الإدراك المكاني لتحديد موقع المستخدم وحركته داخل العالم الرقمي.
وتبرز أهم استخداماته في التدريب والمحاكاة والألعاب والتعليم العملي، لأن هذه البيئات تسمح بتجربة سيناريوهات يصعب تنفيذها في الواقع أو تكون مكلفة وخطرة إذا نفذت فعليا.
مقالة ذات صلة: Virtual reality: الواقع الافتراضي حيث تتم إزالة الحدود بين الواقع والحلم!.
التوأم الرقمي
يقوم هذا النوع على إنشاء نسخة رقمية محدثة باستمرار لكيان مادي، مثل مصنع أو مبنى أو آلة أو مدينة كاملة. وتتغذى هذه النسخة بالبيانات القادمة من المستشعرات لتبقى متزامنة مع الحالة الفعلية للأصل الحقيقي.
ويسمح ذلك بمراقبة الأداء، وتحليل الأعطال، واختبار التغييرات قبل تطبيقها على الواقع، لذلك أصبح التوأم الرقمي من أهم أدوات الصناعة الذكية وإدارة البنية التحتية والمدن الذكية.
البيئات التعاونية المشتركة
يتيح هذا النوع لعدة مستخدمين رؤية النموذج المكاني نفسه والتفاعل معه في الزمن الحقيقي، حتى لو كانوا في مواقع جغرافية مختلفة. ويشاهد الجميع العناصر الرقمية بالموقع نفسه ويستطيعون تعديلها أو مناقشتها بشكل مباشر.
ويستخدم بشكل متزايد في فرق التصميم الهندسي والمعماري والاجتماعات التفاعلية والتدريب الجماعي، لأنه يقلل الحاجة إلى السفر ويعزز التعاون بين الفرق الموزعة حول العالم.
الأنظمة الذاتية والروبوتات الذكية
يعتمد هذا النوع على تمكين الروبوتات والمركبات والطائرات المسيرة من فهم البيئة المحيطة واتخاذ قرارات مستقلة بناء على الإدراك المكاني. ويشمل ذلك التعرف على العوائق، وتخطيط المسارات، والتنقل داخل المساحات المعقدة.
وتستخدم هذه الأنظمة في المستودعات الآلية، والمصانع، والخدمات اللوجستية، والزراعة الذكية، والمركبات الذاتية القيادة، حيث تحتاج الآلات إلى فهم المكان والتفاعل معه دون تدخل بشري مباشر.
مقارنة بين أنواع الحوسبة المكانية
| النوع | طبيعة التفاعل | أبرز الاستخدامات |
|---|---|---|
| الإدراك المعتمد على الواقع المعزز | إضافة معلومات وعناصر رقمية فوق المشهد الحقيقي | الملاحة، التعليم، الصيانة، التجزئة |
| الإدراك المعتمد على الواقع المختلط | تفاعل مباشر بين العناصر الرقمية والبيئة الحقيقية | الهندسة، الطب، التصميم الصناعي |
| البيئات الافتراضية الغامرة | انغماس كامل داخل عالم رقمي مستقل | التدريب، المحاكاة، الألعاب |
| التوأم الرقمي | نسخة رقمية متزامنة مع أصل مادي | الصناعة، البنية التحتية، المدن الذكية |
| البيئات التعاونية المشتركة | مشاركة نموذج مكاني بين عدة مستخدمين | التصميم التعاوني، الاجتماعات، التدريب |
| الأنظمة الذاتية والروبوتات الذكية | إدراك المكان واتخاذ القرار بشكل مستقل | الروبوتات، المستودعات، المركبات الذاتية |
أهم خصائص الحوسبة المكانية
تتميز هذه التقنية بمجموعة من الخصائص التي تميزها عن أنظمة الحوسبة التقليدية، وتفهم هذه الخصائص يساعد المؤسسات على تقييم مدى ملاءمة هذه الحلول لاحتياجاتها الفعلية قبل الاستثمار فيها.
من أبرز هذه الخصائص:
- الإدراك المستمر للبيئة الفيزيائية وأبعادها الثلاثية
- التزامن اللحظي بين المحتوى الرقمي والمكان الحقيقي
- القدرة على التعاون بين عدة مستخدمين في نفس البيئة المكانية
- الاعتماد على مزيج من المعالجة المحلية والسحابية والطرفية
- التكامل الوثيق مع الذكاء الاصطناعي لفهم السياق وليس فقط الشكل
أبرز مميزات الحوسبة المكانية
- تحسين كفاءة العمليات الميدانية عبر توفير معلومات سياقية مباشرة في مكان الحاجة
- تقليل الأخطاء البشرية في المهام المعقدة عبر التوجيه البصري التفاعلي
- تسريع التدريب على المهارات عالية الخطورة دون تعريض المتدربين لمخاطر حقيقية
- تمكين التعاون عن بعد بشكل أكثر واقعية من مكالمات الفيديو التقليدية
- فتح آفاق جديدة لتحليل البيانات المكانية على مستوى المدن والمنشآت الكبيرة
عيوب وتحديات الحوسبة المكانية
- ارتفاع تكلفة الأجهزة المتقدمة في بعض القطاعات الصناعية والطبية
- الحاجة لبنية تحتية قوية من حيث الشبكات وقدرة المعالجة
- تحديات الخصوصية الناتجة عن جمع كميات كبيرة من البيانات المكانية الحساسة
- صعوبة تحقيق التوافق الكامل بين مختلف الأجهزة والمنصات
- الحاجة لكوادر متخصصة قادرة على تطوير وصيانة هذه الأنظمة المعقدة
استخدامات الحوسبة المكانية في مختلف القطاعات
انتقلت هذه التقنية من كونها فكرة تجريبية محدودة إلى أداة عملية تدخل في صميم عمليات قطاعات حيوية متعددة. هذا الانتشار الواسع يعكس مرونة هذه التقنية وقدرتها على التكيف مع احتياجات مختلفة تماما من قطاع لآخر.
في الأقسام التالية، سنستعرض أبرز التطبيقات العملية لهذه التقنية عبر اثني عشر قطاعا رئيسيا، مع توضيح القيمة المضافة التي تقدمها في كل سياق.
الرعاية الصحية
تساهم هذه التقنية في تحويل طريقة تقديم الرعاية الصحية عبر توفير أدوات تشخيص وتدريب أكثر دقة وأمانا. يمكن للجراحين استخدام نماذج ثلاثية الأبعاد دقيقة لأعضاء المريض قبل الدخول في غرفة العمليات، ما يقلل من المخاطر ويحسن من نتائج العمليات المعقدة.
من التطبيقات البارزة في هذا المجال:
- المساعدة الجراحية عبر عرض معلومات حيوية مباشرة أثناء العملية
- تدريب الأطباء على حالات نادرة باستخدام محاكاة واقعية
- تتبع حركة المرضى داخل المستشفيات الكبيرة لتحسين سير العمل
التعليم والتدريب
يفتح هذا المجال آفاقا جديدة أمام التعليم عبر تحويل المفاهيم المجردة إلى تجارب مرئية وتفاعلية يمكن للطلاب استكشافها بأنفسهم. بدلا من قراءة وصف نظري لبنية خلية أو محرك ميكانيكي، يمكن للطالب رؤية النموذج ثلاثي الأبعاد والتفاعل معه مباشرة.
من أبرز الاستخدامات في هذا القطاع:
- عرض النماذج العلمية المعقدة بشكل ثلاثي الأبعاد داخل الفصول الدراسية
- تدريب الطلاب على مهارات عملية عالية الخطورة في بيئة آمنة تماما
- تمكين التعلم عن بعد بشكل أكثر تفاعلية من الفيديوهات التقليدية
الصناعة والتصنيع الذكي
في بيئات التصنيع، تساهم هذه التقنية في تحسين كفاءة خطوط الإنتاج عبر توفير إرشادات مباشرة للعمال أثناء تنفيذ المهام المعقدة، ما يقلل من الأخطاء ويسرع من وتيرة التدريب على المعدات الجديدة بشكل ملحوظ مقارنة بالطرق التقليدية.
من أبرز تطبيقاتها في هذا المجال:
- إرشاد العمال خطوة بخطوة أثناء تجميع المنتجات المعقدة
- الصيانة التنبؤية عبر عرض بيانات أداء المعدات مباشرة فوقها
- مراقبة خطوط الإنتاج عن بعد بواقعية أعلى من الشاشات التقليدية
الأمن السيبراني
تلعب هذه التقنية دورا متزايد الأهمية في مجال الأمن السيبراني، سواء بوصفها أداة دفاعية جديدة أو مصدرا لمخاطر أمنية إضافية تحتاج لإدارة دقيقة. سنتعمق أكثر في هذا الجانب في قسم مخصص لاحق من هذا المقال.
من أبرز الاستخدامات الحالية:
- مراقبة الوصول الفيزيائي للمنشآت الحساسة بشكل بصري تفاعلي
- محاكاة سيناريوهات الهجمات السيبرانية في بيئة تدريبية غامرة
- تحليل الأنماط المكانية المرتبطة بمحاولات الاختراق الفيزيائي
المدن الذكية
تعتمد المدن الذكية على هذه التقنية لبناء نماذج رقمية شاملة تجمع بيانات المرور والطاقة والخدمات في منظومة موحدة قابلة للتحليل والمراقبة في الزمن الحقيقي، ما يساعد صناع القرار على إدارة الموارد الحضرية بكفاءة أعلى بكثير.
من أبرز التطبيقات في هذا السياق:
- تحسين تدفق حركة المرور بناء على تحليل مكاني آني للبيانات
- إدارة استهلاك الطاقة في المباني العامة بشكل ديناميكي
- تخطيط استجابة الطوارئ بناء على نماذج مكانية دقيقة للمدينة
التجارة الإلكترونية والتجزئة
تتيح هذه التقنية للمتسوقين تجربة المنتجات افتراضيا قبل الشراء، ما يقلل من معدلات الإرجاع ويحسن من رضا العملاء بشكل عام. يمكن للمستخدم مثلا رؤية كيف تبدو قطعة أثاث داخل غرفته الفعلية قبل اتخاذ قرار الشراء النهائي.
من أبرز تطبيقاتها في هذا القطاع:
- تجربة المنتجات افتراضيا داخل بيئة المستخدم الحقيقية
- تحسين تجربة التسوق داخل المتاجر الفعلية عبر معلومات تفاعلية
- تحليل سلوك التسوق المكاني لتحسين تصميم المتاجر
النقل والخدمات اللوجستية
تساهم هذه التقنية في تحسين كفاءة عمليات النقل والتخزين عبر توفير رؤية دقيقة ومحدثة باستمرار لحركة البضائع والمركبات، ما يساعد الشركات على تقليل التكاليف التشغيلية وتحسين مواعيد التسليم بشكل ملموس.
من أبرز تطبيقاتها في هذا المجال:
- تحسين تخطيط المسارات بناء على بيانات مكانية آنية
- إدارة المستودعات الذكية عبر توجيه العمال بصريا لمواقع المخزون
- مراقبة أساطيل النقل ومتابعة حالتها في الزمن الحقيقي
الهندسة والعمارة والبناء
يستفيد المهندسون والمعماريون من هذه التقنية لمعاينة التصاميم المعمارية في حجمها الطبيعي قبل بدء البناء الفعلي، ما يساعد على اكتشاف مشاكل التصميم مبكرا ويوفر تكاليف تعديلات باهظة كان يمكن اكتشافها فقط بعد التنفيذ في الماضي.
من أبرز تطبيقاتها في هذا القطاع:
- معاينة المباني والمنشآت بحجمها الطبيعي قبل التنفيذ
- تنسيق العمل بين فرق هندسية متعددة على نفس النموذج الرقمي
- مراقبة تقدم أعمال البناء ومطابقتها مع التصميم الأصلي
الطاقة والمرافق
تساعد هذه التقنية شركات الطاقة والمرافق على مراقبة وصيانة البنية التحتية الواسعة النطاق، مثل شبكات الكهرباء وخطوط الأنابيب، عبر عرض بيانات الأداء والصيانة مباشرة فوق المعدات الفعلية في الموقع الميداني نفسه.
من أبرز تطبيقاتها:
- الصيانة الميدانية الموجهة بصريا لمحطات الطاقة والشبكات
- مراقبة أداء المعدات عن بعد بواقعية أعلى من لوحات التحكم التقليدية
- تخطيط توسعة البنية التحتية بناء على نماذج مكانية دقيقة للموقع
الزراعة الذكية
تساهم هذه التقنية في تحسين إدارة المزارع الكبيرة عبر تحليل بيانات مكانية دقيقة عن حالة التربة والمحاصيل والري، ما يساعد المزارعين على اتخاذ قرارات أكثر دقة بشأن توقيت الري والتسميد ومكافحة الآفات بكفاءة أعلى من الطرق التقليدية.
من أبرز تطبيقاتها:
- مراقبة صحة المحاصيل عبر تحليل مكاني للصور الجوية والميدانية
- توجيه المعدات الزراعية الآلية بدقة عالية داخل الحقول
- تخطيط أنظمة الري بناء على خرائط دقيقة لتضاريس الأرض
الدفاع والاستجابة للطوارئ
تستخدم الجهات الدفاعية وفرق الاستجابة للطوارئ هذه التقنية لبناء صورة مكانية دقيقة ومحدثة عن مناطق العمليات، ما يساعد على اتخاذ قرارات أسرع وأكثر دقة في المواقف الحرجة التي لا تحتمل التأخير أو الأخطاء.
من أبرز تطبيقاتها:
- التخطيط للعمليات الميدانية بناء على نماذج مكانية ثلاثية الأبعاد
- تدريب الفرق على سيناريوهات طوارئ واقعية دون مخاطر فعلية
- تنسيق جهود الإنقاذ عبر مشاركة صورة مكانية موحدة بين الفرق
الترفيه والألعاب
يعد هذا القطاع من أوائل المجالات التي تبنت هذه التقنية على نطاق واسع، حيث تتيح الألعاب المعتمدة على الحوسبة المكانية للاعبين التفاعل مع عناصر رقمية داخل بيئتهم الفعلية بطريقة لم تكن ممكنة مع الأجيال السابقة من الألعاب المسطحة على الشاشات.
من أبرز تطبيقاتها:
- ألعاب تفاعلية تدمج المساحة الفعلية للاعب في تجربة اللعب
- تجارب ترفيهية جماعية يشارك فيها عدة لاعبين في نفس المكان
- عروض فنية وثقافية تفاعلية تدمج الرقمي بالفيزيائي
دور الحوسبة المكانية في الأمن السيبراني
مع اتساع نطاق استخدام هذه التقنية في القطاعات الحساسة، أصبح دورها في منظومة الأمن السيبراني موضوعا يستحق تركيزا خاصا. فهي في الوقت نفسه أداة دفاعية قوية ومصدر مخاطر جديد يحتاج لفهم دقيق من فرق الأمن المؤسسي.
من جهة، توفر أنظمة الإدراك المكاني قدرات مراقبة وتحليل غير مسبوقة للبيئات الفيزيائية الحساسة، ومن جهة أخرى، فإن الكم الهائل من البيانات الحساسة التي تجمعها هذه الأنظمة يجعلها هدفا جذابا للجهات المهاجمة إن لم تتم حمايتها بشكل صحيح.
الأقسام التالية تستعرض بالتفصيل كيف تعزز هذه التقنية الدفاعات الأمنية من جهة، والمخاطر الجديدة التي تفرضها من جهة أخرى، إضافة إلى أفضل الممارسات الموصى بها لتأمين هذه الأنظمة الحساسة بشكل فعال.
كيف تعزز الحوسبة المكانية الدفاعات الأمنية ضد الهجمات السيبرانية
تتيح هذه التقنية لفرق الأمن مراقبة المنشآت الحساسة بطريقة بصرية تفاعلية تتجاوز حدود كاميرات المراقبة التقليدية، حيث يمكن للنظام ربط بيانات الوصول الرقمي بالحركة الفيزيائية الفعلية داخل المنشأة، ما يكشف محاولات الاختراق التي تجمع بين البعد الرقمي والفيزيائي معا.
من أبرز الطرق التي تعزز بها هذه التقنية الأمن السيبراني:
- الكشف عن محاولات الوصول غير المصرح به عبر تحليل مكاني للحركة
- محاكاة سيناريوهات هجوم واقعية لتدريب فرق الاستجابة بشكل عملي
- ربط البيانات الفيزيائية والرقمية لكشف الأنماط المشبوهة بشكل أدق
المخاطر الأمنية الجديدة في بيئات الحوسبة المكانية
في المقابل، تفتح هذه الأنظمة أبوابا جديدة للمخاطر الأمنية لم تكن موجودة في بيئات الحوسبة التقليدية. جمع كميات ضخمة من البيانات المكانية الحساسة، بما في ذلك تفاصيل دقيقة عن المباني والأشخاص، يجعل من هذه الأنظمة هدفا ذا قيمة عالية للمهاجمين.
من أبرز المخاطر الجديدة في هذا السياق:
- اختراق المستشعرات والكاميرات للوصول لبيانات مكانية حساسة
- التلاعب بالبيانات المعروضة لتضليل المستخدمين في بيئات حرجة
- استغلال ثغرات الأجهزة الطرفية كنقطة دخول لشبكات المؤسسة الأوسع
أفضل الممارسات لحماية أنظمة الحوسبة المكانية
نظرا لحساسية البيانات التي تتعامل معها هذه الأنظمة، تحتاج المؤسسات لاعتماد استراتيجية أمنية شاملة تغطي كل طبقة من طبقات المنظومة، بدءا من الأجهزة الطرفية وصولا إلى البنية السحابية التي تعالج وتخزن هذه البيانات.
من أبرز الممارسات الموصى بها:
- تشفير البيانات المكانية أثناء النقل والتخزين بشكل كامل
- تطبيق سياسات وصول صارمة ومتعددة المستويات للأنظمة الحساسة
- إجراء اختبارات اختراق دورية مخصصة لأجهزة ومستشعرات الحوسبة المكانية
أمثلة واقعية على الحوسبة المكانية
| القطاع | مثال تطبيقي واقعي |
|---|---|
| الصحة | أنظمة مساعدة جراحية تعرض بيانات حيوية أثناء العمليات |
| الصناعة | إرشادات صيانة تفاعلية تظهر مباشرة فوق المعدات الفعلية |
| التجزئة | تجربة معاينة الأثاث افتراضيا داخل المنزل قبل الشراء |
| المدن الذكية | نماذج رقمية شاملة لإدارة المرور والطاقة في الزمن الحقيقي |
| التعليم | نماذج علمية ثلاثية الأبعاد تفاعلية داخل الفصول الدراسية |
| اللوجستيات | أنظمة توجيه بصري للعمال داخل المستودعات الذكية |
أبرز الشركات والمنصات الرائدة في الحوسبة المكانية
| الشركة أو المنصة | مجال التركيز الأساسي |
|---|---|
| شركات النظارات الذكية الكبرى | تطوير أجهزة عرض متقدمة للواقع المختلط والمعزز |
| مزودو الخدمات السحابية الكبار | توفير بنية تحتية سحابية لمعالجة البيانات المكانية الضخمة |
| شركات الرقائق المتخصصة | تصميم معالجات مخصصة للذكاء الاصطناعي والرؤية الحاسوبية |
| منصات تطوير الألعاب والمحتوى التفاعلي | توفير أدوات بناء تجارب مكانية للمطورين |
| شركات المسح الجغرافي والخرائط | إنشاء نماذج رقمية دقيقة للمدن والمنشآت الكبيرة |
مستقبل الحوسبة المكانية
كل المؤشرات الحالية تشير إلى أن هذا المجال ما زال في مراحله المبكرة رغم التقدم الكبير المحقق حتى الآن. الاستثمارات المتزايدة من كبرى شركات التقنية، إلى جانب النضج المتسارع للذكاء الاصطناعي والشبكات فائقة السرعة، تمهد لموجة جديدة من التطبيقات العملية خلال السنوات القليلة القادمة.
من المتوقع أن تصبح الأجهزة أخف وزنا وأكثر قدرة في آن واحد، مع استمرار انخفاض التكلفة بشكل يجعل هذه التقنية في متناول شريحة أوسع من المستخدمين والمؤسسات الصغيرة والمتوسطة، وليس محصورة في الشركات الكبرى ذات الموارد الضخمة فقط كما هي الحال اليوم.
في الوقت نفسه، ستفرض هذه التقنية تحديات تنظيمية وأخلاقية جديدة تتعلق بالخصوصية وحماية البيانات المكانية الحساسة، ما سيدفع الجهات التنظيمية حول العالم لوضع أطر قانونية أكثر وضوحا تحكم جمع واستخدام هذا النوع من البيانات على نطاق واسع.
أبرز الاتجاهات المتوقعة خلال السنوات القادمة
- انتشار أوسع للنظارات الذكية الخفيفة بأسعار أكثر تنافسية
- تكامل أعمق مع نماذج الذكاء الاصطناعي متعددة الوسائط
- نمو ملحوظ في تطبيقات التوأم الرقمي المتصلة بالحوسبة المكانية
- تطور أطر تنظيمية جديدة خاصة بخصوصية البيانات المكانية
- توسع استخدامها في القطاعات الصحية والتعليمية بشكل خاص
هل الحوسبة المكانية آمنة؟
سؤال الأمان في هذا المجال يحتاج لإجابة متعددة الأبعاد، فهو يشمل الأمان السيبراني للبيانات من جهة، والأمان الفيزيائي للمستخدم أثناء استخدام الأجهزة من جهة أخرى. كلا البعدين يحتاجان لاهتمام جدي من مطوري الأنظمة والمؤسسات التي تتبناها.
من الناحية السيبرانية، تعتمد درجة الأمان بشكل كبير على مدى التزام الشركة المصنعة والمؤسسة المستخدمة بأفضل ممارسات التشفير وإدارة الوصول التي تم استعراضها سابقا في هذا المقال. الأنظمة المصممة بشكل جيد يمكن أن تكون آمنة بدرجة عالية، لكن الإهمال في التطبيق قد يعرض بيانات حساسة للخطر.
أما من الناحية الفيزيائية، فقد أظهرت الدراسات أن الاستخدام المطول لبعض أجهزة العرض قد يسبب إجهادا بصريا أو دوارا لدى بعض المستخدمين، ما يدفع الشركات المصنعة لتطوير معايير استخدام أكثر أمانا وميزات تتبع صحية تنبه المستخدم عند الحاجة لأخذ استراحة.
أفضل الممارسات لتبني الحوسبة المكانية داخل المؤسسات
- البدء بمشروع تجريبي محدود النطاق قبل التوسع في التطبيق الكامل
- تقييم البنية التحتية الحالية للشبكات وقدرة المعالجة المتاحة
- إشراك فرق الأمن السيبراني منذ المراحل الأولى للتخطيط
- تدريب الموظفين تدريجيا لضمان تبني سلس دون مقاومة داخلية
- وضع مؤشرات أداء واضحة لقياس العائد الفعلي على الاستثمار
نصائح قبل الاستثمار في حلول الحوسبة المكانية
- التحقق من مدى توافق الحل المقترح مع الأنظمة الحالية في المؤسسة
- مراجعة سياسات الخصوصية وحماية البيانات الخاصة بمزود الحل
- طلب دراسة حالة واقعية من قطاع مشابه قبل اتخاذ القرار النهائي
- تقييم تكلفة الصيانة طويلة المدى وليس فقط تكلفة الشراء الأولية
- التأكد من وجود دعم فني محلي أو إقليمي يسهل حل المشاكل بسرعة
خاتمة
من خلال هذا الاستعراض الشامل، يتضح أن الحوسبة المكانية ليست مجرد موجة تقنية عابرة، بل طبقة أساسية جديدة تعيد تشكيل العلاقة بين الإنسان والمكان والبيانات. من المصانع إلى المستشفيات، ومن المدارس إلى المدن الذكية، تثبت هذه التقنية يوما بعد يوم قدرتها على إضافة قيمة حقيقية وملموسة.
النجاح في تبني هذه التقنية لن يعتمد فقط على قوة الأجهزة أو دقة الخوارزميات، بل على مدى استعداد المؤسسات لإعادة التفكير في طريقة عملها وتدريب كوادرها والاهتمام الجاد بالجوانب الأمنية والأخلاقية المرتبطة بجمع واستخدام البيانات المكانية الحساسة.
مع استمرار التطور المتسارع في هذا المجال، يبقى من الضروري متابعة أحدث التطورات باستمرار، سواء من ناحية الأدوات والمنصات الجديدة أو من ناحية الأطر التنظيمية الناشئة، حتى تتمكن المؤسسات من الاستفادة القصوى من هذه التقنية دون التعرض لمخاطرها غير المدروسة.
الأسئلة الشائعة حول الحوسبة المكانية
فيما يلي إجابات مختصرة على الأسئلة الأكثر تكرارا حول هذا الموضوع، لمن يريد مراجعة سريعة للنقاط الأساسية دون العودة لكامل تفاصيل المقال.
ما الفرق بين الحوسبة المكانية والواقع المعزز؟
الواقع المعزز هو إضافة عناصر رقمية بسيطة فوق مشهد العالم الحقيقي، بينما الحوسبة المكانية مفهوم أوسع يشمل الإدراك العميق للمكان ومعالجته وربطه بمنظومة كاملة من البيانات، ويعد الواقع المعزز أحد تطبيقاتها الفرعية.
هل تعتمد الحوسبة المكانية على الذكاء الاصطناعي؟
نعم، يعد الذكاء الاصطناعي عنصرا أساسيا في هذه المنظومة، فهو المسؤول عن تفسير البيانات المكانية الخام وتحويلها إلى معلومات ذات معنى يمكن للنظام التفاعل معها بدقة وسرعة.
ما أبرز استخدامات الحوسبة المكانية في الأمن السيبراني؟
تشمل أبرز الاستخدامات مراقبة الوصول الفيزيائي للمنشآت الحساسة، ومحاكاة سيناريوهات الهجمات لتدريب فرق الاستجابة، وربط بيانات الوصول الرقمي بالحركة الفيزيائية لكشف الأنماط المشبوهة.
ما الأجهزة المطلوبة للاستفادة من الحوسبة المكانية؟
تختلف الأجهزة حسب طبيعة التطبيق، لكنها غالبا تشمل نظارات ذكية أو أجهزة عرض متخصصة، مستشعرات دقيقة مثل الكاميرات ثلاثية الأبعاد أو الليدار، ووحدات معالجة محلية أو اتصال مستقر بالسحابة.
ما أبرز التحديات التي تواجه الحوسبة المكانية حاليا؟
من أبرز التحديات ارتفاع تكلفة بعض الأجهزة المتقدمة، وحاجة البنية التحتية لشبكات قوية، وتحديات الخصوصية المرتبطة بجمع بيانات مكانية حساسة، وصعوبة تحقيق توافق كامل بين مختلف الأجهزة والمنصات.
هل ستحل الحوسبة المكانية محل تطبيقات الهواتف وأجهزة الكمبيوتر مستقبلا؟
من غير المرجح أن تحل محلها بشكل كامل في المدى المنظور، لكنها ستتكامل معها بشكل أعمق تدريجيا، بحيث تصبح طبقة إضافية للتفاعل تكمل الأجهزة التقليدية في سيناريوهات معينة بدلا من إلغائها تماما.
